
Иерархия целей и планов
В схеме регулирования на рис. 2.6 цель изображена как нечто единое, целое. Однако мы хорошо знаем, что бывают сложные цели, в процессе достижения которых система ставит пред собой промежуточные, «частичные», цели. Мы уже приводили примеры двухфазных движений: чтобы вспрыгнуть на стул, кошка сначала приседает, а потом подпрыгивает. В более сложных ситуациях цели образуют иерархию, состоящую из многих уровней. Предположим, вы ставите перед собой цель приехать из дома на работу. Это ваша «высшая» цель в данный момент. Припишем ей индекс (номер уровня) нуль. Чтобы приехать на работу, вам нужно выйти из дома, пройти к остановке автобуса, доехать до нужной остановки и т. д. Это цели с индексом минус единица. Чтобы выйти из дома, надо выйти из квартиры, спуститься в лифте и выйти из подъезда. Это цели с индексом минус два. Чтобы спуститься в лифте, надо открыть дверь, войти в лифт и т. д. — индекс минус три. Чтобы открыть дверь лифта, надо протянуть руку к дверной ручке, нажать на нее и потянуть к себе — индекс минус четыре. Эти цели можно уже, пожалуй, считать элементарными.
Цель вместе с указанием способа ее достижения, т. е. разложения на подчиненные цели, называют планом действия. Наш пример есть фактически описание плана приезда на работу. В цели самой по себе, которая в данном случае есть представление «я — на рабочем месте», никакой иерархической структуры нет. Основной логической единицей, образующей иерархию, является план, а цели образуют иерархию лишь постольку, поскольку они являются элементами плана.
Американские психологи Дж.Миллер, Е.Галантер и К.Прибрам в своей книге «Планы и структура поведения» принимают понятие плана в качестве основы описания поведения человека и животных. Они показывают особенность и плодотворность такого подхода. В отличие от классической рефлекторной дуги (без обратной связи) логическая единица описания поведения, используемая этими авторами, содержит петлю обратной связи (рис. 2.10). Эту единицу они называют схемой T-O-T-E, по начальным буквам английских слов test-operate-test-exit (проверка — операция — проверка — выход).
Проверка здесь означает проверку соответствия ситуации и цели. В случае несоответствия производится операция, в случае соответствия план считается выполненным, и система идет на «выход». В качестве примера ни рис. 2.11 показан план забивания гвоздя в доску, представленный в виде единицы T-O-T-E.
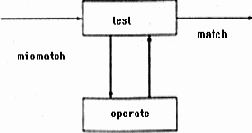
Рис. 2.10. ЕдиницаT-O-T-E (test-operate-test-exit)
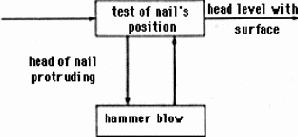
Рис. 2.11. Забивание гвоздя
Схема T-O-T-E на рис. 2.10 изображает то же самое явление регулирования, которое было изображено на рис. 2.6. Отличие между ними в способе изображения. Схема на рис. 2.6 — структурная, на рис. 2.10 — функциональная. Эти понятия надо пояснить. Заодно мы уточним понятие управления.